Радиолокационное наблюдение и прокладка,
средства автоматической радиолокационной прокладки
- Принцип работы РЛС
- Подготовка РЛС к работе
- Решение задачи выбора оптимального курса для расхождения на безопасной дистанции
- Рекомендации по использованию РЛС для решения навигационных задач
- Памятка оператору радиолокационной станции
Принцип работы РЛС (наверх)
Радиолокационная станция (РЛС) или радАр (англ. radar от RAdio Detection And Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и направления на объект.

Используется метод, основанный на излучении короткого радиоимпульса и регистрации времени прохождения импульса от приемоизлучающей антенны до отражающего объекта и назад до антенны.
Дистанция рассчитывается как произведение времени прохождения импульсом расстояния до объекта и назад (τ) и скорости распространения электромагнитных колебаний (с=300 000 км/сек), деленное на 2.
ДРЛС= (с х τ)/2
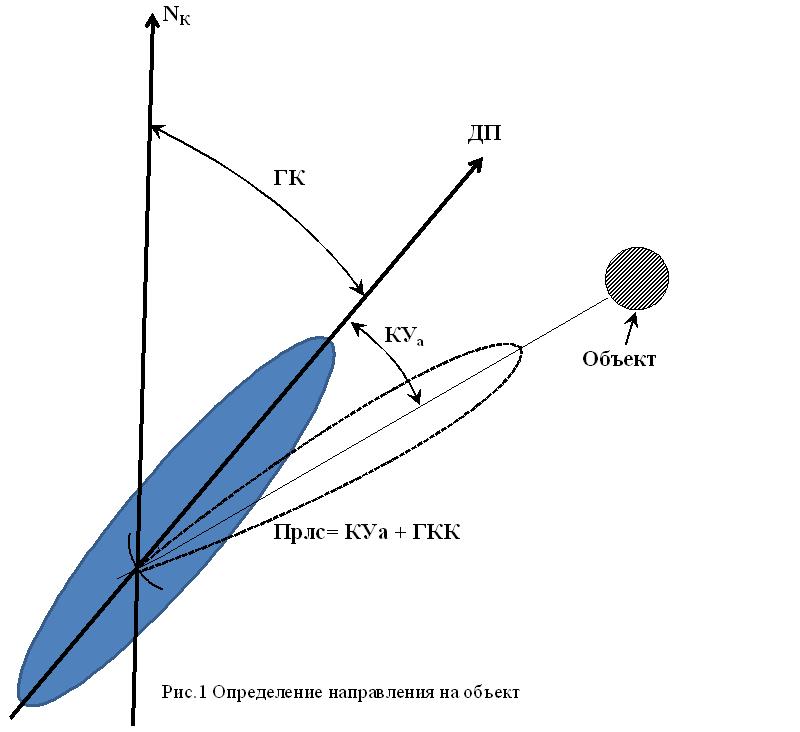
Направление на объект радиолокационная станция (РЛС) определяет с помощью диаграммы направленности антенны (рис. 1), которая составляет у современных РЛС от 0,7 до 1,5 градусов. Радиолокационный пеленг (ПРЛС) определяется как сумма курсового угла диаграммы направленности антенны (КУа) и курса по гирокомпасу (ГКК)
ПРЛС= КУа + ГКК
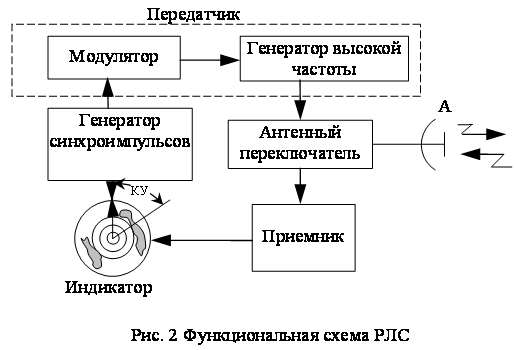
Функциональная схема РЛС показана на рис.2
Подготовка РЛС к работе (наверх)
После включения РЛС необходимо просмотреть обстановку начиная с 3 и до 12 миль. Все цели на удалении до 12 миль в пределах 90o правого борта и левого борта взять на сопровождение. Ближние цели в кормовой части тоже следует контролировать. Затем выбирается шкала дистанции, позволяющая наблюдать цели, с которыми необходимо разойтись на безопасном расстоянии.
Включается стабилизированный режим ориентации (N UP или C UP).
Устанавливается с использованием подвижного круга дальности (VRM) безопасная дистанция расхождения с встречными целями - Дбез. Длина вектора при целях (R Vectors) выбирается от 6 до 12 мин (для лучшего видения вектора).
В меню NAV включается индикация маршрута Route Display (ON).
Решение задачи выбора оптимального курса для расхождения на безопасной дистанции (наверх)
1. С использованием трекбола «захватить» цели для автоматического сопровождения.
2. Через 1-1,5 минуты САРП решает задачу расчета формуляра (П, Д, Дкр, Ткр, Кц,, Vц) для сопровождаемых целей.
3. Регулировкой величины R vectors продлить вектор через круг безопасности.
4. Включив режим истинного вектора (T Vectors) оценить взаимное положение своего судна и опасных целей. На основе оценки с учетом требований МППСС и «хорошей морской практики» определить сторону уклонения для расхождения.
5. Включить режим относительных векторов (R Vectors).
6. Вызвать меню TRIAL MANOEUVRE.
7. Включить режим RUNNING (ON).
8. Изменить курс (CSE) в нужную (см.п.4) сторону на 20-30 градусов. Оценить ситуацию.
9. Если все линии R Vectors проходят вне круга безопасности – задача решена. Если нет, то подбором курса (предпочтительно) и скорости (в последнюю очередь) добиться безопасного расхождения. Отметьте, что в течение всего времени решения задачи время упреждения (Delay) уменьшается.
10. Результатом решения задачи является курс и скорость на который необходимо лечь до окончания времени упреждения (Delay). Для этого по величине изменения курса из лоцманской таблицы (Pilot card) выбирают время циркуляции на этот угол. При достижении времени упреждения, равном времени циркуляции надо начать маневр.
11. После покладки на новый курс, дождаться обновления данных задачи САРП (1-1,5 мин) и оценить правильность маневра. При необходимости подкорректировать курс.
Рекомендации по использованию РЛС для решения навигационных задач (наверх)
Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8-16 миль) с периодическим просмотром окружающей обстановки на шкалах крупного масштаба (малой дальности).
Следует учитывать, что один и тот же сигнал лучше обнаруживается на шкалах мелкого масштаба (большой дальности), чем на шкалах крупного масштаба (малой дальности), так как в мелком масштабе эхо-сигнал занимает меньшую площадь на экране, а яркость его больше.
В стесненных водах наблюдение рекомендуется вести, исходя из обстоятельств плавания, на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах.
Шкалы дальности 32 и 64 мили использовать для определения места судна по высоким берегам. После обсервации необходимо сразу перейти к шкале средней или малой дальности для продолжения наблюдения.
Наибольшую точность измерения пеленга, связь радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «NUP»-«Север».
Для уменьшения погрешности пеленга от неточной центровки нужно применять такую шкалу дальности, чтобы эхо-сигнал пеленгуемого объекта оказался на периферии экрана.
Если имеется выбор, следует предпочесть точечные объекты, местоположение которых достоверно известно любым другим.
Когда объект наблюдения не точечный, то нужно убедиться, что он пригоден для радиолокационного пеленгования, и его можно опознать на карте.
Расстояния измерять в быстрой последовательности, начиная с ориентиров, расположенных ближе к траверзу.
Одновременно с измерениями расстояния измерять для контроля и радиолокационные пеленги: если полученная по ним точка близка к обсервованной, то это подтверждает, что ориентиры опознаны правильно и нет грубых погрешностей.
Чтобы уменьшить влияние качки на точность радиолокационных измерений, нужно пеленговать ориентиры, расположенные на носовых (кормовых) и траверзных углах. Если необходимо получить точный пеленг га объект при качке, рекомендуется брать несколько отсчетов пеленга при разных углах качки судна и осреднять отсчеты.
Для уменьшения случайной погрешности рекомендуется производить наблюдения при возможно крупном масштабе изображения и совмещать внешний край подвижного круга дальности - ПКД (VRM) с передним краем изображения объекта.
Яркость ПКД (VRM) должна быть минимальной.
Наиболее точно и просто можно измерить расстояния до отдельно лежащих объектов и обрывистых мысов, наименее точно – до низких берегов, пологих мысов и т.п. Поэтому к расстояниям, измеренным до береговой черты или до объектов, распложенных в отдалении от уреза воды (возвышенности, здания, маяки), всегда следует относиться с осторожностью.
При работе с РЛС точность линии положения по расстоянию в 5-6 раз выше, чем по пеленгу. Поэтому при радиолокационных определениях места предпочтительнее те способы, при которых используется расстояние.
Чтобы обнаружить суда и другие объекты, оказавшиеся в теневых секторах, нужно периодически, на короткое время изменять курс на угол, равный наибольшему теневому сектору, расположенному в носовых курсовых углах.
Памятка оператору радиолокационной станции (наверх)
При включении РЛС первоначально надо использовать самую малую шкалу дальности, чтобы осмотреть ближний, а, следовательно, и самый опасный участок вокруг судна. Затем, последовательно увеличивая диапазон, просматривать более дальние зоны, обращая внимание на сектор 600 левого и правого борта. Следует помнить, что правый борт является опасным и необходимо уступать дорогу судам, находящимся с правого борта.
Использование рукоятки усиления видеосигнала УСИЛЕНИЕ (GAIN) позволяет улучшить качество изображения сигнала от цели на экране РЛС. Всегда следует регулировать настройку УСИЛЕНИЕ (GAIN), когда работа осуществляется при больших диапазонах дальности в 12 или 24 морских миль (от 24 до 48 км). При работе с большими дальностями необходимо иметь на отображении легкий точечный фон, что позволит обеспечить наилучшее обнаружение целей. При наличии снега или дождя временное уменьшение коэффициента усиления может оказаться полезным в процессе поиска целей. Усиление видеосигнала может подстраиваться независимо в режимах AUTO (автоматический) и MAN (ручной) борьбы с помехам
Использование рукоятки Дождь (Rain) связано с уменьшением помех от дождя в заданном участке экрана. Это действие вполне возможно ухудшит видимость в другой части экрана. Поэтому используйте регулировку борьбы с помехами Дождь (Rain) для оптимизации подавления помех, обусловленных дождем, т.е. постарайтесь сбалансировать обнаружение целей в интересуемом вам участке экрана при наличии помех от дождя с обнаружением этих же целей вне района, охваченного дождем.
Этой регулировкой всегда следует пользоваться с большой осторожностью. Чрезмерное подавление может привести к пропуску малоразмерных целей. Зачастую наилучшим способом применения этой регулировки является ее использование для поиска целей в регионе с помехами с последующим возвратом ее в нулевое положение после окончания поиска.
Использование рукоятки Волны (SEA) позволяет уменьшить (но не устранить полностью) засветку от волн в ближней к судну части экрана. При этом следует помнить, что, вращая эту рукоятку, вы ослабляете сигнал от цели. Поэтому используйте регулировку борьбы с помехами Волны (SEA) для уменьшения уровня обусловленных морем помех до такого состояния, когда на экране будут присутствовать лишь отдельные остаточные отметки. Настройка должна позволять различать малоразмерные цели, сила отраженного сигнала от которых зачастую соразмерна с отметками, обусловленными морем.
Этой регулировкой всегда следует пользоваться с большой осторожностью. Избегайте установки регулировки на такой уровень, когда с экрана исчезают все помехи, обусловленные влиянием моря, поскольку это ухудшит обнаружение малоразмерных целей. Эту настройку следует периодически проверять, по мере изменения превалирующих условий на море. Излишнее подавление помех от волн может привести к исчезновению сигнала цели.
При наличии режима автоматического подавления помех автоматический (AUTO) можно в условиях открытого моря использовать для подавления обусловленных влиянием моря и дождя помех этот режим. Этот режим обычно обеспечивает оптимальное обнаружение путем подбора уровня подавления помех по уровню принимаемых мешающих сигналов. Импульсы, принимаемые от радарных ответчиков, оказываются слегка ослабленными. Однако, они все еще достаточно отличаются от помех по силе сигнала.