Механические гироскопы
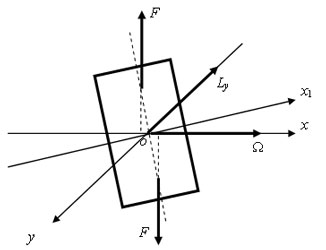 Механические гироскопы, которые в настоящее время наиболее широко используются в морском, авиационном, ракетном и космическом приборостроении, имеют существенный недостаток – низкую точность работы. Можно считать, что технологически их пределы точности давно достигнуты. Причина их сравнительно невысокой точности в недостатках подвеса, невозможности идеальной балансировки и полного исключения сил трения. Следствием этих недостатков является такое явление, как регулярная прецессия гироскопа, когда ось вращения и ось фигуры не совпадают. Такое явление приводит к дрейфу гироскопа, что и снижает его точностные показатели. Механические гироскопы, которые в настоящее время наиболее широко используются в морском, авиационном, ракетном и космическом приборостроении, имеют существенный недостаток – низкую точность работы. Можно считать, что технологически их пределы точности давно достигнуты. Причина их сравнительно невысокой точности в недостатках подвеса, невозможности идеальной балансировки и полного исключения сил трения. Следствием этих недостатков является такое явление, как регулярная прецессия гироскопа, когда ось вращения и ось фигуры не совпадают. Такое явление приводит к дрейфу гироскопа, что и снижает его точностные показатели.По крайней мере от одного из этих недостатков удалось избавиться в средине 60-х годов 20-го века. Обратимся к рисунку. На нем показан профиль гироскопа, имеющего собственную угловую скорость вращения ?, а его ось вращения х не совпадает с осью симметрии х1. Если бы эти оси совпадали, то центробежные силы инерции F взаимокомпенсировали бы друг друга, то есть линии их приложения проходили бы через центр подвеса – точку о. Очевидно, что при несовпадении осей относительно точки о каждая из сил образует плечо. Таким образом возникает гироскопический момент Lу, то есть момент центробежных сил, который является одной из причин регулярной прецессии. Во избежание данного явления был приложен динамически настраиваемый гироскоп. |
|