
Учебная цель: изучить технико-эксплуатационные характеристики, принцип работы гирокурсоуказателя «Вега», состав и назначение прибором комплекта, их размещение на судне; проанализировать причины возникновения методических погрешностей гирокурсоуказателя.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
1.5.2. Режим гирокомпаса
Обратимся к рис. 1.1. Допустим, в начальный момент главная ось гиросферы отклонена от меридиана к востоку на угол α. Вследствие вращения Земли главная ось, сохраняя неизменным свое положение в инерциальном пространстве, в горизонтной системе координат уходит в азимуте к востоку и поднимается по высоте. Появившиеся при этом углы рассогласования между полюсами ЧЭ и следящей сферы будут сниматься в виде электрических сигналов с обмоток ДДУ И после усиления в УГ и УА поступят на двигатели. Двигатели ДВГ и ДВВ приведут следящую сферу в согласованное положение с гиросферой.
Со следящей сферой жестко связан индикатор горизонта ИГ (реально в приборе он установлен на внутреннем кардановом кольце), причем его рабочая плоскость параллельна главной оси ЧЭ. Следовательно, при отклонении оси х гиросферы от плоскости горизонта на такой же угол отклонится и следящая сфера, а на выходе индикатора горизонта появится электрический сигнал, пропорциональный этому отклонению. Далее рассмотрим работу ГАК по каналам.
Сигнал ИГ поступает на усилитель УГ, а затем на двигатель ДВГ Двигатель начинает работать, разворачивая следящую сферу вокруг оси у. Гиросфера остается на месте, следовательно, горизонтальные торсионы закручиваются, создавая вращательный момент по оси у (для данного случая в отрицательную сторону). Под действием этого момента гиросфера прецессирует в азимуте к западу. Таким образом, двигатель ДВГ создал горизонтальный момент, вызвавший движение ЧЭ в азимуте, поэтому он получил название датчика моментов азимутального ДМА (в литературе его также называют датчиком горизонтальных моментов). Горизонтальные торсионы при этом выполняют роль не только подвеса и центрирования гиросферы, но и прикладывают к ней крутящий момент. Кроме того, торсионы используются как провода для подачи питания на ЧЭ.
Итак, гиросфера прецессирует в азимуте к западу под действием созданного момента Ly. Восточная часть горизонта в инерциальном пространстве опускается, поэтому, пока ось отклонена к востоку, она продолжает подниматься в горизонтной системе координат. Возрастание угла β подъема главной оси приводит к нарастанию сигнала ИГ, а значит, и к увеличению момента Ly, который вызывает пропорциональное увеличение скорости прецессии ЧЭ к западу.
Вращение плоскости горизонта происходит вокруг линии меридиана. Когда гиросфера достигнет его плоскости под действием момента Ly,то окажется поднятой на максимальный угол. Соответственно максимальны сигнал ИГ, момент Ly и угловая скорость прецессии. Пройдя с наибольшей скоростью плоскость меридиана, ось х окажется в западной части горизонта, которая в инерциальном пространстве поднимается. Вследствие этого угол подъема главной оси уменьшается, вызывая уменьшение сигнала ИГ, а значит, и момента Ly. Угловая скорость прецессии уменьшается. Продолжая снижаться, ось х опускается под плоскость горизонта. Сигнал ИГ изменяет знак. Датчик моментов ДМГ создает момент Ly, направленный к востоку, куда и начинается прецессия гиросферы.
При своем движении к меридиану ось х продолжает опускаться вследствие вращения Земли, так как она все еще находится в западной части горизонта. Сигнал ИГ, а вместе с ним момент Ly, и угловая скорость прецессии возрастают. Максимальных значений они достигают в плоскости меридиана.
Оказавшись в восточной части горизонта, ось х начинает подниматься вследствие вращения Земли, сигнал ИГ уменьшается, угловая скорость прецессии снижается. Когда ось х поднимется над горизонтом, знак момента и направление прецессии меняются. Далее процесс повторяется, гиросфера совершает незатухающие колебания, отклоняясь в азимуте от истинного меридиана к востоку и западу на один и тот же угол α. Момент Ly, вызвавший незатухающие колебания, является маятниковым моментом.
Для превращения незатухающих колебаний в затухающие к гиросфере прикладывается демпфирующий момент, который сдвинут в пространстве относительно маятникового на угол 90°, что равносильно сдвигу по фазе на такой же угол. Он формируется также по данным индикатора горизонта. При отклонении главной оси гиросферы от плоскости горизонта сигнал ИГ поступает не только в горизонтальный канал управления, но и в вертикальный: в усилитель УА и на вертикальный двигатель ДВВ. Двигатель, отрабатывая сигнал, принудительно рассогласовывает следящую сферу с гиросферой. В результате вертикальные торсионы закручиваются, прикладывая к гиросфере крутящий момент по оси z. Теперь вертикальный двигатель выполняет не только функцию слежения, но и создает вертикальный момент, поэтому он называется датчиком вертикальных моментов ДМВ.
Вертикальный момент ограничивает скорость подъема и опускания главной оси гиросферы. Это ограничивает нарастание сигнала ИГ, а значит, и маятникового момента, что приводит к затуханию колебаний ЧЭ. Таким образом, вертикальный момент является демпфирующим.
Маятниковый и демпфирующий моменты - это управляющие моменты гирокомпаса. Они создаются по данным индикатора горизонта через следящую систему. Отсюда следует, что связь гироскопа с Землей осуществляется через ИГ, то есть косвенным путем, поэтому ГКУ «Вега» называется гирокомпасом с косвенным управлением.
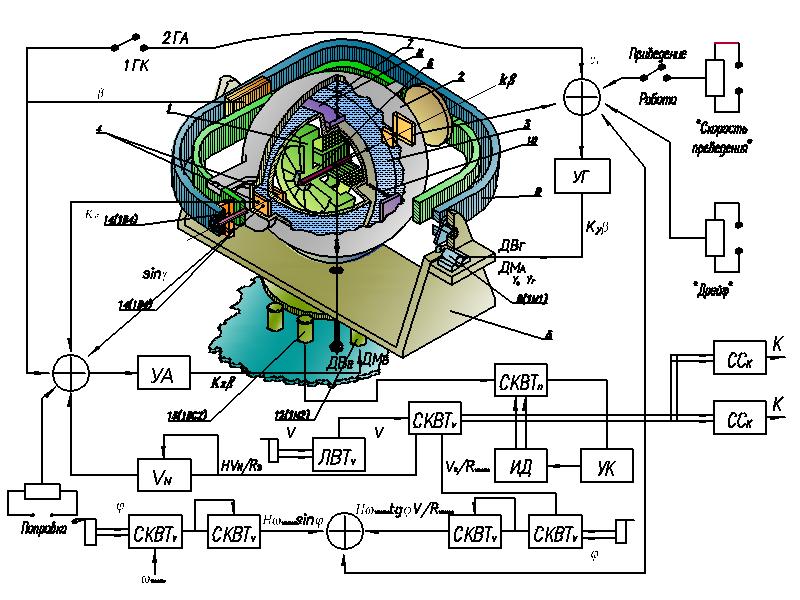
Рис 1.1. Принципиальная схема гирокомпаса «Вега»
1 Астатический (уравновешенный) гироскоп; 2 Следящая сфера; 3 Специальная нетокопроводная жидкость; 4 Двухкоординатные датчики угла; 5 Вертикальное карданово кольцо; 6 Шейка гиромоторора; 7 Установочное вертикальное кольцо; 8 Горизонтальная пара торсионов; 9 Горизонтальное карданово кольцо; 10 Вертикальная пара торсионов; 11 Двигатель горизонтальный, Датчик моментов азимутальный; 12 Двигатель вертикальный, Датчик моментов вертикальный; 13 Синусно-косинусный вращающийся трансформатор СКВТД, являющийся датчиком курса; 14 Синусно-косинусный вращающийся трансформатор (СКВТ), преобразователь координат ПТ-001