Учебная цель: изучить принцип действия гироазимуткомпаса по функциональной схеме. Научиться анализировать работу ГКУ в исправном состоянии.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
3.3.Трансляции курса. Принцип работы схемы коррекции
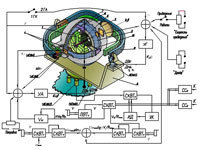
При изменении курса судна гиросфера (рис. 1.1) остается в меридиане, а следящая сфера начинает поворачиваться вместе с судном. В результате происходит их рассогласование в азимуте и возникает сигнал на обмотках 4 ДДУ, который после усиления в усилителе УА поступает па вертикальный двигатель 12, возвращающий следящую сферу в согласованное положение с гиросферой. При этом двигатель поворачивает ротор вращающегося трансформатора СКВТД 13, который является датчиком курса. Его роторные обмотки (синусная и косинусная) накоротко замкнуты со статорными обмотками СКВТП - приемника курса, который находится в приборе ВГ-3А и работает в трансформаторном режиме, то есть в начальный момент времени остается на месте. В результате и цепи замкнутых обмоток текут уравнительные токи, наводящие ЭДС в синусной обмотке ротора СКВТП. Данный сигнал поступает в усилитель УК, а затем на исполнительный двигатель ИД. Двигатель вращает ротор СКВТП до исчезновения сигнала. Так происходит трансляция курса из основного прибора ВГ-1А в штурманский пулы - прибор ВГ-3А, Одновременно вращение двигателя передается датчикам курса, роль которых выполняют сельсины СКД и ССД, для трансляции потребителям истинного курса (ИК). В репитерах курс принимается сельсинами-приемниками.
Кроме того, значение истинного курса необходимо для выработки сигналов коррекции. Для этого двигатель разворачивает на угол, равный истинному курсу, ротор еще одной электрической машины – СКВТV, с синусной и косинусной обмоток которой снимаются напряжения, пропорциональные составляющим скорости судна соответственно по параллели VЕ = V sin ИК и меридиану – VN = V cos ИК. Напряжение, пропорциональное V, питает обмотку возбуждения СКВТV. Данное напряжение вырабатывается линейным вращающимся трансформатором СКВТV, в который скорость либо поступает от лага, либо вводится вручную ручкой «V». Сигнал с косинусной обмотки СКВТу, отмасштабированный до уровня VN/Rð (Rð - радиус Земли), поступает в канал вертикального управления гиросферой для исключения скоростной девиации.
Для формирования корректирующего сигнала в азимуте необходим узел широты, в котором имеются шкала широты «φ» и две электрические машины: СКBTφ и ЛBTφ. Широта вводится ручкой «φ», с помощью которой роторы обеих машин разворачиваются на соответствующий угол. Обмотка возбуждения первой из них питается напряжением, пропорциональным ωð, и с ее синусной обмотки снимается сигнал, определяемый выражением ωðsinω. Он обеспечивает широтную коррекцию ГКУ на неподвижном основании. С выхода CКBTV снимается сигнал VE/Rð и подается на обмотку возбуждения ЛВTφ. Его выходное напряжение будет:
U ~ (VE /Rð)tgφ.
Сигналы СКBTφ и ЛBTφ складываются, и их сумма, пропорциональная корректирующему моменту LКУ =Нωðsin φ (VE/Rð) tgφ, идет в азимутальный канал на датчик моментов, который закручивает торсионы на дополнительный угол, обеспечивая широтную коррекцию гиросферы как на неподвижном, так и подвижном основании.
В режиме ГА индикатор горизонта отключается от азимутального канала (переключатель ГК - ГА), то есть маятниковый момент к ЧЭ не прикладывается. Удерживает гиросферу в азимуте момент LKУ, сформированный, как указано выше.
Инструментальные погрешности изготовления гироблока (неточная выставка торсионов, дебаланс гиросферы и т. д.) и снижение со временем точности выработки корректирующих моментов приводят к появлению постоянной поправки гирокомпаса и азимутального дрейфа гироазимута. Для их компенсации имеются соответствующие резисторы: в вертикальном канале резистор «Поправка», в горизонтальном - резистор «Дрейф». С их помощью регулируют корректирующие моменты в процессе настройки прибора.