Учебная цель: изучить устройство приборов комплекта гирокурсоуказателя «Вега», размещение и назначение органов управления и регулировки; проанализировать способы компенсации методических погрешностей и исключения взаимовлияния азимутального и вертикального каналов управления.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
2.1. Основной прибор ВГ-1А
Основной прибор ВГ-1А состоит из корпуса с размещенной в нем гиросекцией, которая заключает в себе трехстепенной поплавковый гироблок (ТПГ) с чувствительным элементом внутри.
Составная часть трехстепенного поплавкового гироблока - его чувствительный элемент, имеет массу 600 г. Он выполнен в виде двух полусфер, соединенных между собой цилиндрической шейкой-перемычкой (рис. 2.1). Образованная таким образом сфера называется гиросферой 1. Внутри нее размещается гиромотор - асинхронный трехфазный двигатель. Ротор гиромотора выполнен в виде двух маховиков 2, симметрично насаженных на вал 3, вращающийся в установленных в корпусе гиросферы шарикоподшипниках 4. Скорость вращения ротора - 12000 оборотов в минуту. На валу между маховиками расположена роторная обмотка 5 гиромотора. На внутренней поверхности шейки закреплена статорная обмотка 6, на которую подается трехфазный ток 40 В, 500 Гц. Гиросфера герметична и заполнена водородом. На гиросфере напротив торцов вала установлены статоры ДДУ - двухкоординатных датчиков угла 7. Технологические соединения на рис. 2.1 не показаны.
Гиросфера размещена внутри следящей сферы. Зазор между сферами равен 2 мм. Он заполнен жидкостью, плотность которой при рабочей температуре 73 ± 4° С обеспечивает нейтральную плавучесть чувствительного элемента.
Для поддержания температуры жидкости в заданных пределах имеется специальная система терморегулирования. На корпусе гироблока размещены два кольцевых обогревателя и биметаллическое реле ТР-003, используемые для прогрева гироблока при запуске прибора. Для управления схемой обогрева ВГ-1А имеются два термодатчика. Каждый из них представляет собой спираль из медной проволоки, уложенную в пазах гироблока, залитых клеем. Величина активного сопротивления термодатчика характеризует температуру гироблока.
Корпус гиросферы (рис. 1.1) с помощью пары горизонтальных торсионов подвешен в вертикальном установочном кольце 7, расположенном снаружи шейки 6 и выполняющем роль рамы карданова подвеса. Установочное кольцо, в свою очередь, с помощью пары вертикальных торсионов подвешено в следящей сфере, которая одновременно служит корпусом гироблока. Обе пары торсионов лежат в одной плоскости, перпендикулярной главной оси гироскопа.
Торсионы изготовлены из тонкой стальной проволоки и при закручивании создают упругий крутящий момент, пропорциональный углу закрутки. Они установлены со значительным осевым натягом, что препятствует их изгибу, но не мешает упругому закручиванию каждой пары торсионов вокруг своей оси в пределах малых углов. Внутри гироблока имеются упоры, которые ограничивают углы поворота корпуса гироблока относительно гиросферы, а значит, и углы закрутки торсионов, в пределах около ±2°.
Большая изгибная жесткость подвеса, созданная осевым натягом торсионов, центрирует гиросферу, препятствуя ее повороту относительно корпуса гироблока вокруг главной оси и смещению гиросферы вдоль этой оси.
Питание на чувствительный элемент полается как через торсионы, так и через токопроводы, свободно навитые вокруг торсионов.
Следящая сфера представляет собой сложную конструкцию и в собранном виде имеет форму куба. Ее внутренняя поверхность выполнена сферической, где и размещается гиросфера.
Для измерения углов рассогласования между следящей сферой и гиросферой по азимуту и высоте служат два двухкоординатных датчика угла (ДДУ), расположенные с двух сторон блока по оси х. Статоры ДДУ размещены на гиросфере с торцов вала гиромотора, а роторы - на следящей сфере напротив статоров.
Рис. 2.1
1 гиросфера; 2 Ротор гиромотора выполнен в виде двух маховиков; 3 вал; 4 шарикопошипники; 5 роторная обмотка 5 гиромотора; 6 На внутренней поверхности шейки закреплена статорная обмотка 6; 7 ДДУ
Статор датчика угла представляет собой катушку, намотанную на стержень и размещенную в металлическом стакане. На катушку подается напряжение частотой 500 Гц, и вокруг статора возникает переменное магнитное поле.
Ротор состоит из рамки (рис.2.2), установленной на следящей сфере на расстоянии 2 мм от торца статора. В рамке уложены две пары взаимно перпендикулярных обмоток. Пара I обеспечивает слежение за ЧЭ по высоте и называется горизонтной, пара II - азимутальная. Соединение обмоток в каждой ларе последовательное (согласное). Когда механического рассогласования нет, то есть геометрические центры статора и ротора совпадают, на выходах обмоток ротора сигнал равен нулю.
Если рассогласование происходит в вертикальной плоскости (по высоте), то статор перемещается к одной из горизонтных обмоток, ЭДС в которой возрастает. В другой обмотке ЭДС уменьшается, и суммарное напряжение уже не равно нулю. Возникший на клеммах I сигнал является сигналом рассогласования. Он подается на усилитель УГ и на горизонтальный двигатель ДВГ. Последний разворачивает следящую сферу вокруг оси у до исчезновения сигнала рассогласования, то есть до согласованного положения статора и ротора.
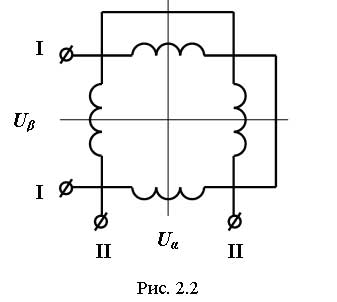
При смещении геометрического центра статора в азимуте, например вправо, величина ЭДС в правой обмотке увеличивается, в левой уменьшается. Возникший на выходе II сигнал рассогласования после усиления в усилителе УА отрабатывается вертикальным двигателем. ДВН разворачивает следящую сферу до исчезновения сигнала рассогласования.
Расположение двух одинаковых последовательно соединенных ДДУ на противоположных сторонах гироблока позволяет исключать погрешности из-за изменения зазоров при сотрясениях гироблока, а также повышает крутизну сигналов рассогласования.
Торсионы и датчики угла при сборке выставляют так, чтобы положение, в котором сигналы ДДУ равны нулю, соответствовало незакрученному состоянию торсионов, то есть чтобы «электрический нуль» датчиков угла совпадал с «упругим нулем» торсионов.