
Учебная цель: изучить технико-эксплуатационные характеристики, принцип работы гирокурсоуказателя «Вега», состав и назначение прибором комплекта, их размещение на судне; проанализировать причины возникновения методических погрешностей гирокурсоуказателя.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега»..
1.5.3. Коррекция гирокомпаса
Из вышеизложенного следует, что управляющие моменты создаются по данным индикатора горизонта, а его сигнал существует только тогда, когда имеется отклонение главной оси гиросферы от плоскости горизонта. Если ось х окажется в плоскости истинного меридиана, который в инерциальном пространстве не поднимается и не опускается, то вертикальный (демпфирующий) момент приведет ее в плоскость горизонта. Сигнал ИГ исчезнет. Таким образом гироскоп становится свободным и вследствие вращения Земли начинает движение в азимуте. Как только появится угол α отклонения в азимуте, начинается подъем оси х гироскопа. С индикатора горизонта снимется сигнал, пропорциональный углу подъема β. По данному сигналу формируются управляющее моменты, причем маятниковый момент направлен к западу, куда и начинается прецессия гироскопа. Однако, пока углы α и β небольшие, скорость прецессии меньше скорости вращения меридиана и углы, а вместе с ними и управляющие моменты, будут возрастать. В конечном итоге прецессия к западу под действием маятникового момента сравняется с угловой скоростью вращения меридиана. Теперь гироскоп следит за меридианом с отставанием от него на угол αГ=δφ, который называется широтной девиацией, или девиацией затухания ГКУ. Таким образом, для слежения за меридианом гироскопу необходим постоянный момент но оси y, направленный к западу. Для этого главная ось должна быть приподнята над горизонтом, чтобы с ИГ снимался сигнал, создающий маятниковый момент. Такое положение у гирокурсоуказателя возможно только тогда, когда ось х наклонена к востоку на угол αГ.
Для исключения широтной девиации вычислительная схема прибора ВГ-ЗА (рис. 1.1) рассчитывает сигнал, который поступает на азимутальный датчик моментов ДМА. Последний, отрабатывая сигнал, закручивает горизонтальные торсионы и создает корректирующий момент LKУ к западу, приводящий гиросферу в меридиан и обеспечивающий слежение за ним.
На движущемся судне у гирокомпаса возникает скоростная девиация. Для ее исключения в вычислительной схеме ГЛК вырабатывается сигнал, поступающий в вертикальный канал управления. Датчик моментов ДМВ закруткой вертикальных торсионов корректирует пропорционально скоростной девиации.
Таким образом, в отличие от гирокомпасов типа «Курс» у ГКУ «Вега» компенсация погрешностей осуществляется коррекцией непосредственно чувствительного элемента, поэтому прибор получил название корректируемого гирокомпаса. Благодаря действию корректирующих моментов гиросфера всегда находится в плоскости истинного меридиана и горизонта.
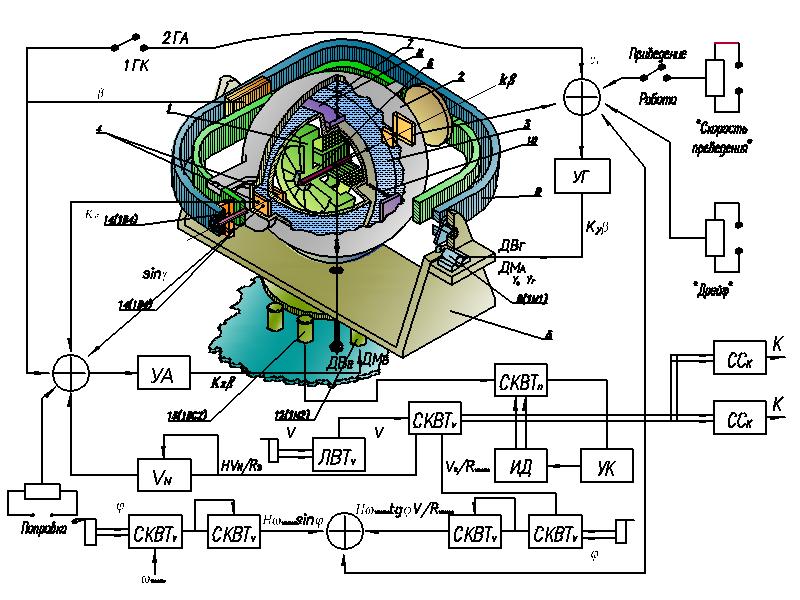
Рис 1.1. Принципиальная схема гирокомпаса «Вега»
1 Астатический (уравновешенный) гироскоп; 2 Следящая сфера; 3 Специальная нетокопроводная жидкость; 4 Двухкоординатные датчики угла; 5 Вертикальное карданово кольцо; 6 Шейка гиромоторора; 7 Установочное вертикальное кольцо; 8 Горизонтальная пара торсионов; 9 Горизонтальное карданово кольцо; 10 Вертикальная пара торсионов; 11 Двигатель горизонтальный, Датчик моментов азимутальный; 12 Двигатель вертикальный, Датчик моментов вертикальный; 13 Синусно-косинусный вращающийся трансформатор СКВТД, являющийся датчиком курса; 14 Синусно-косинусный вращающийся трансформатор (СКВТ), преобразователь координат ПТ-001