Учебная цель: изучить устройство приборов комплекта гирокурсоуказателя «Вега», размещение и назначение органов управления и регулировки; проанализировать способы компенсации методических погрешностей и исключения взаимовлияния азимутального и вертикального каналов управления.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
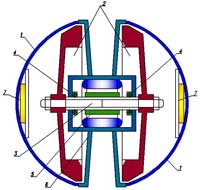
В состав гиросекция кроме гироблока входят системы его подвеса и термостабилизации (рис. 1.1).
Гироблок размещен в установочном кольце, которое своими цапфами закреплено в подшипниках карданова кольца 9. На установочном кольце с западной стороны параллельно главной оси гироскопа находится индикатор горизонта. Горизонтальное кольцо цапфами входит в подшипники внешнего вертикального кольца 5, на котором смонтирован горизонтальный двигатель (он же датчик моментов ДМГ), передающий через зубчатую передачу вращение на горизонтальное кольцо. Наружное карданово кольцо посажено вертикальной цапфой в подшипниках корпуса прибора ВГ-1 А.
Вертикальный двигатель ДВВ (он же датчик моментов ДМВ) через редуктор связан с вертикальным кардановым кольцом и поворачивает его относительно оси, перпендикулярной палубе судна. Таким образом, гироблоку обеспечивается три степени свободы.
Двигатель ДВВ отрабатывает сигнал рассогласования в азимуте, возникающий при изменении курса. Одновременно через зубчатую передачу он поворачивает синусно-косинусный вращающийся трансформатор 13 СКВТД, являющийся датчиком курса. От него информация о курсе поступает в прибор ВГ-ЗА для дальнейшей обработки.
Для придания гироблоку устойчивости в плоскости горизонта его центр тяжести смещен вниз, а для гашения свободного раскачивания на установочном кольце имеется жидкостный демпфер (не путать указанные конструктивные решения со способами превращения гироскопа в гирокомпас в приборах типа «Курс» и «Амур»).
Из рассмотренного устройства гиросекции следует, что датчики моментов жестко связанны с вертикальным кардановым кольцом, которое перпендикулярно палубе. Это означает, что при кренах и дифферентах судна датчики моментов вместе с кольцом наклоняются на угол γ,а гироблок, благодаря маятниковости, остается в горизонтальном положении. Таким образом, торсионы останутся в прежнем горизонтальном положении, а оси вращения датчиков моментов рассогласуются с ними.
Данное состояние показано на рис. 2.3. Торсионы расположены соответственно по осям у и z, а оси вращения отклонены от этих осей на угол γ. В результате азимутальный датчик моментов ДМА создает крутящий момент не только по оси у, но и по оси z, а вертикальный ДМВ - не только но оси z, но и по оси у. Возникает перекрестное взаимовлияние датчиков моментов. При этом особенно значительно влияние ДМА на вертикальные торсионы, так как моменты, которые он создает, приблизительно в 22 раза больше моментов от ДМВ. При наклоне вертикального кольца (т.е. при статическом крене или дифференте) в 7-9° прибор теряет работоспособность. Из рис. 2.3 видно:
ΣLУ = -LУГ+LZГ = -LУcos γ +LZsin γ;
ΣLZ= LУВ+LZВ = LУcos γ +LZcos γ
Из выражений следует, что для устранения перекрестных связей необходимо исключить составляющие LУВ = LУ siny и LZГ = LZ sin γ. Особенно важно устранить первую из них из-за ее значительности. Для этой цели служит преобразователь координат ПТ-001 (рис. 1.1), в качестве которого используется синусно-косинусный вращающийся трансформатор (СКВТ) 14, уставов ленный с южной стороны гироблока. На обмотку ротора ПТ-001 подается сигнал с азимутальных обмоток ДДУ. Статор ПТ закреплен в горизонтальном кардановом кольце и наклоняется с ним на угол γ при крене и дифференте судна. Для этой цели служит преобразователь координат ПТ-001 (рис. 1.1), в качестве которого используется синусно-косинусный вращающийся трансформатор (СКВТ) 14, уставов ленный с южной стороны гироблока.

Для этой цели служит преобразователь координат ПТ-001 (рис. 1.1), в качестве которого используется синусно-косинусный вращающийся трансформатор (СКВТ) 14, установленный с южной стороны гироблока. На обмотку ротора ПТ-001 подается сигнал с азимутальных обмоток ДДУ. Статор ПТ закреплен в горизонтальном кардановом кольце и наклоняется с ним на угол γ при крене и дифференте судна. Ротор ПТ связан с установочным кольцом, которое остается в горизонтальном положении. Это приводит к возникновению в статорной обмотке сигнала sin γ .который подастся в вертикальный канал управления (усилитель УА и ДМВ). Таким образом, в значительной степени исключается взаимовлияние следящих систем, что обеспечивает их устойчивую работу как при статических кренах и дифферентах, так и при качке. Следует подчеркнуть, что наличие ПТ обеспечивает устойчивую работу прибора, но не исключает девиацию при качке, вызванную силами инерции.
На основании гиросекции вокруг гироблока на трех стойках укреплены кольцевой обогреватель и два термореле. Одно из них управляет обогревателем, а второе включает цепь ревуна при превышении температуры внутри корпуса прибора ВГ-1А.