
Учебная цель: изучить технико-эксплуатационные характеристики, принцип работы гирокурсоуказателя «Вега», состав и назначение прибором комплекта, их размещение на судне; проанализировать причины возникновения методических погрешностей гирокурсоуказателя.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
1.5. Принцип работы
В отличие от маятникового гирокомпаса чувствительный элемент (ЧЭ) ГКУ «Вега» имеет астатический (уравновешенный) гироскоп 1 (рис. 1.1), который с помощью горизонтальной пары торсионов 10 (по оси у) и вертикальной пары торсионов 8 (по оси z) подвешен в следящей сфере 2, являющейся внешним корпусом гироблока. Торсион - это отрезок проволоки, работающий на скручивание вокруг своей продольной оси. Для снятия нагрузки на торсионы за счет массы ЧЭ пространство между ним и следящей сферой заполнено специальной нетоконроводной жидкостью 3. Жидкость при рабочей температуре обеспечивает чувствительному элементу нулевую плавучесть.
Положение следящей сферы относительно ЧЭ измеряется с помощью двухкоординатных датчиков угла 4 (ДДУ), роторы которых расположены на следящей сфере, а статоры - на полюсах гиросферы 1 (по оси х).
1.5.1. Режим свободного гироскопа
Одной из основных особенностей схемы ГКУ является то, что его следящая система используется не только по своему прямому назначению слежение за положением ЧЭ по азимуту и высоте, но и участвует в создании управляющих и корректирующих моментов гироскопа.
Чувствительный элемент, сохраняя неизменным свое положение в инерциальном пространстве, вследствие вращения Земли видимым образом движется в горизонтной системе координат в азимуте и по высоте. Следящая сфера остается на месте, поэтому она рассогласуется с гиросферой.
Появившееся таким образом перемещение гиросферы в азимуте приводит к рассогласованию статора и ротора ДДУ и к возникновению электрического сигнала рассогласования на его соответствующих обмотках. Этот сигнал усиливается усилителем УА (рис. 1.1) и поступает на вертикальный двигатель ДВВ. Последний через зубчатую передачу разворачивает следящую сферу посредством вертикального кольца (5) в азимуте до исчезновения сигнала рассогласования, то есть до согласованного положения с гиросферой.
Перемещение гиросферы по высоте приводит к появлению сигнала рассогласования на других обмотках ДДУ. Этот сигнал усиливается усилителем УГ и поступает на горизонтальный двигатель ДВГ который разворачивает карданово кольцо 9 вместе со следящей сферой до ее согласования с гиросферой по высоте.
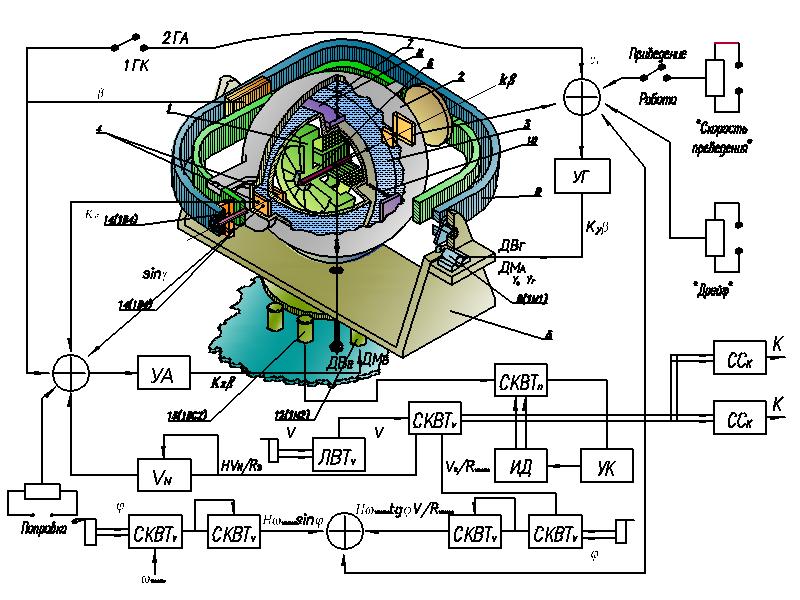
1 Астатический (уравновешенный) гироскоп; 2 Следящая сфера; 3 Специальная нетокопроводная жидкость; 4 Двухкоординатные датчики угла; 5 Вертикальное карданово кольцо; 6 Шейка гиромоторора; 7 Установочное вертикальное кольцо; 8 Горизонтальная пара торсионов; 9 Горизонтальное карданово кольцо; 10 Вертикальная пара торсионов; 11 Двигатель горизонтальный, Датчик моментов азимутальный; 12 Двигатель вертикальный, Датчик моментов вертикальный; 13 Синусно-косинусный вращающийся трансформатор СКВТД, являющийся датчиком курса; 14 Синусно-косинусный вращающийся трансформатор (СКВТ), преобразователь координат ПТ-001
Свободный гироскоп изменяет свое положение в горизонтной системе координат сравнительно медленно, поэтому при циркуляции или качке он остается на месте, а следящая сфера увлекается судном. В результате они рассогласуются друг с другом и возникшие на обмотках ДДУ сигналы отрабатываются так, как уже рассмотрено выше.
Режим свободного гироскопа у ГАК «Вега» не предусмотрен. У некоторых других гирокурсоуказателей этого типа такой режим используется при запуске прибора. Здесь он показан для пояснения работы следящей системы ГАК. Из сказанного в данном параграфе видно, что следящая система является двухканальной, то есть слежение за чувствительным элементом осуществляется в азимуте и по высоте.